

Case Study | Investigation System for Fukushima Reactor
Abingdon, UK
The challenge was to design and construct a remotely controlled, boom-type robotic arm system to investigate the nature and location of nuclear fuel debris in the highly radioactive and contaminated environment of the disabled Unit 2 Reactor.

Case Study | Blended Intelligence for Safe and Efficient Nuclear Sort & Segregation
Fukushima Daiichi, Japan
The challenge was to find a solution to the problem of sorting and segregating radioactive waste generated by nuclear decommissioning activities. The developed solution would be an autonomous, fully integrated system capable of dealing with nuclear waste in a safe and efficient way.
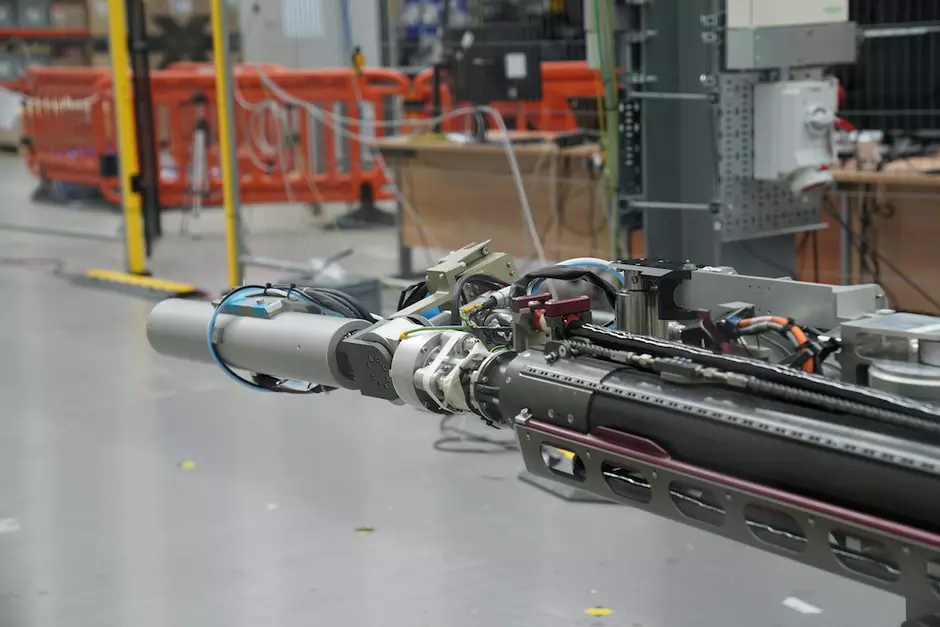
Case Study | Phase 2 PFDR System for Fukushima Reactor
Fukushima Daiichi, Japan
The challenge was to design, construct and test a remotely controlled, boom-type robotic arm system (PFDR) for validating the techniques and technology for removing small volumes of fuel debris from the highly radioactive and highly contaminated environment of the disabled Fukushima Unit 2 Reactor.